3 Arm Delta Robots
In the world of pick and place, the Delta Robot is in a league of its own. These robots are characterized by long arms that lead from shoulder joints to a platform. The motors are fixed in space, ie they do not move with the robot, as they do with SCARA or 6 axis robots. This allows for the minimum amount of moving mass, and the highest possible acceleration.
Most Delta robots on the market are 3 arm robots. For example the Hornet-565 or iX3-565 robot, as shown below, has three arms that connect the platform to the robot. They have three motors which operate the X,Y and Z movement, while an optional 4th motor performs the Z axis rotation, or Theta axis.
 OMRON iX3 3 arm Pick and Place robot
OMRON iX3 3 arm Pick and Place robot
As the robot is used throughout the workspace, the possible acceleration rate varies. Also the stiffness of the system varies as the geometry varies. Typically cycle times are rated near the centre of the workspace, as this is where the 3 arm Delta robot has its greatest acceleration, stiffness and therefore usefulness.
4 Arm Delta Robot
The fourth arm of a Delta robot makes a tremendous improvement to the overall torque required for movements, increases stiffness of the linkage system and allows greater payloads to be handled. The Quattro / iX4 robot requires 40% less torque to perform a movement than a 3 arm delta robot. The resonant frequency of the mechanism is much higher, allowing higher accuracy pick and placement, even when near the boundaries of the workspace.
 OMRON Quattro / iX4 4 arm ultra high speed delta robot with fixed platform
OMRON Quattro / iX4 4 arm ultra high speed delta robot with fixed platform
Theta rotation is performed using a unique skewing of the 4 arms, which rotates the platform. The rotaton is geared up, allowing the robot to achieve up to 360 degree rotation. Because the Theta rotation does not have to be controlled using a shaft, like the 3 arm delta robot does, the work area is not limited by the shaft and the inertia of this theta shaft does not impact performance.
When comparing the cycle time of the Quattro / iX4 robot to other 3 arm robots, it often difficult to see the benefit. However it is not very often that the actual application is operated at the "sweet spot" of the robot geometry, the location where any robot manufacturer would perform their cycle time testing. In real applications, when the full workspace is utilized, the decreased cycle time of the 4 arm robot becomes apparent. The increased stiffness results in more accurate movements with quicker settling into the target position, while the higher acceleration at the extents of the workspace will further reduce cycle times.
Optimizing design for performance
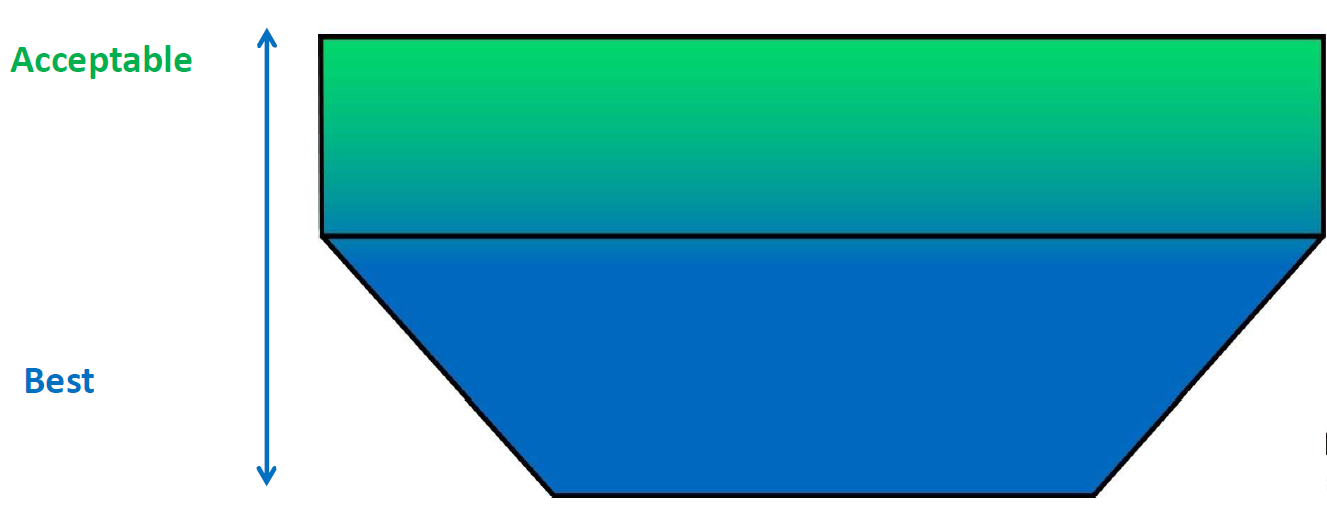
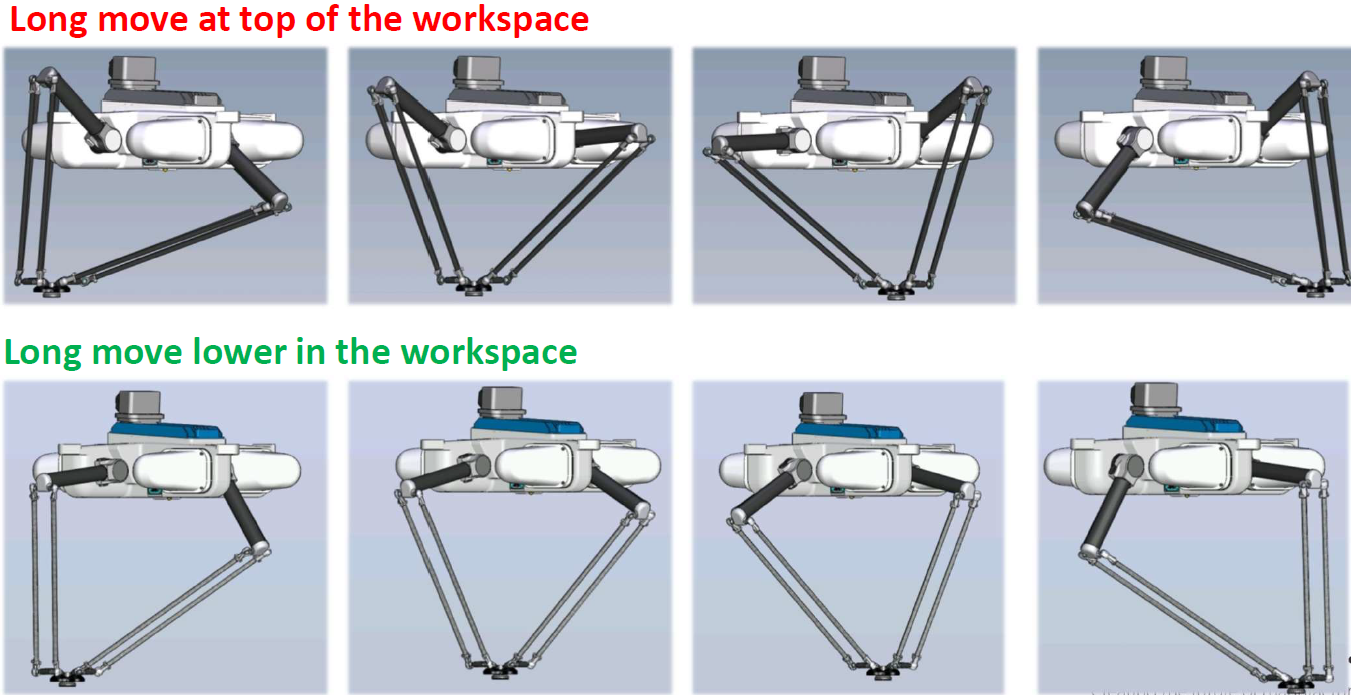
When designing the work area for a 3 arm or 4 arm delta robot, there are a few considerations worth making to optimize the design. For instance, the below diagram shows the best area to arrange the pick and place locations. Lower in the frustrum cone allows higher velocities, as the arms are extended further down. Shorter shoulder movements result in larger platform movements.The below workspace heat map and the diagrams showing the robots geometry in these areas are very useful to understand. IT can be seen that the angle that the shoulder need to move is less when the platform is lower in the workspace.
However the stiffness of the system is almost the opposite. The robot has the highest possible stiffness at the upper extent of the workspace, as shown below.
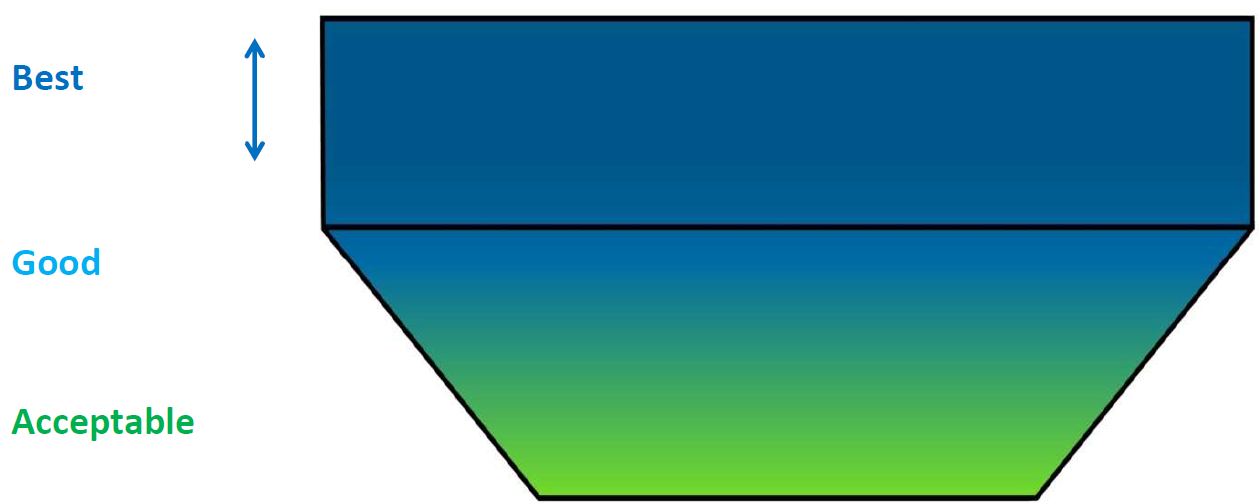
Which region of the workspace the robot should be designed to operate in depends on what is more important. Lower in the workspace will give better speeds and cycle times, higher in the workspace will give better stiffness, higher precision and less vibration.
The Quattro robot is more stiff with tool orientations closer to the world X axis than at locations in the world Y axis. It is stiffest higher in the workspace and along the world X axis. Optimal performance is therefore along the world X axis, and the robot should be orientated in the system to take advantage of this.